Hshmat Sahak
I am a final-year MASc student at the University of Toronto (UofT), co-advised by Tim Barfoot and Nick Rhinehart. My MASc thesis revolves around perception and planning in indoor environments. I completed my BASc in Engineering Science at UofT, with a major in Machine Intelligence and a minor in Robotics & Mechatronics. My BASc thesis was people detection in cluttered indoor environments.
I am fortunate to have worked at great companies and research labs. I have previously worked at the Vector Institute for AI (advised by Prof. Jimmy Ba), Google Brain (Student Researcher, advised by Prof. David Fleet), Tesla (Software Automation Engineer Intern) and Nvidia (Deep Learning Intern). At UofT, I have completed research internships at the Data-Driven Decision-Making Lab (advised by Prof. Scott Sanner) and the Dynamic Systems Lab (advised by Prof. Angela Schoellig).
My plan is to pursue a PhD within computer vision for better robot perception and/or planning algorithms for mobile robots.
My specific research interests include:
- Robot Perception - 3D Object Detection and Semantic Segmentation for Scene Understanding
- Autonomous Path Planning for Indoor and Outdoor Navigation of Robots
- Developing efficient learning algorithms for function optimization in Deep Neural Networks
- Generative AI for Image-to-Image and Discriminative tasks- e.g., Diffusion Models, GANs, NeRF Models
- Broadly interested in Reinforcement Learning and NLP
- Broadly interested in Computer Networks and Distributed Systems
If you are a current Graduate student in Machine Learning, Robotics, or at the intersection, I would love to hear about your work! If you are an incoming Engineering Science student, feel free to connect to ask questions about the program. You can reach me at hshmat.sahak@mail.utoronto.ca
Education
University of Toronto
MASc. in Aerospace Science and Engineering | Sept 2024 - Aug 2026
Collaborative Specialization in Robotics
Advisors: Tim Barfoot, Nick Rhinehart
Thesis: Planning and navigation for indoor mobile robots
GPA: 4.00/4.00
Relevant Courses: State Estimation for Aerospace Vehicles, Imitation Learning for Robotics, AI Applications in Robotics, Mobile Robotics and Perception
University of Toronto
BASc. in Engineering Science | Sept 2019 - Apr 2024
Machine Learning Major, Robotics and Mechatronics Minor
GPA: 3.99/4.00
Relevant Courses: Machine Learning, Robot Modelling and Control, Artificial Intelligence, Control Theory,
Systems Software, Computing, Probabilistic Reasoning, Distributed Systems
Work Experience
Applied ML Intern
Cerebras Systems Inc.
May 2024 - Aug 2024 · Toronto, ON, CA
Expanded MathVista and MMMU datasets by creating augmented versions with similar samples, improving model performance
in multimodal math problem solving and visual reasoning. Compared retrieval methods using CLIP, DINO, and I-JEPA
embedding spaces, leading to higher scores across benchmarks including GQA, MathVista, MMMU, and VQA. Developed
long-context datasets using clustering techniques to optimize model performance on extended sequence length tasks.
Software Automation Engineer Intern
Tesla
May 2023 - Aug 2023 · Fremont, CA, USA
Worked on Root Cause Analysis in the Cell Manufacturing Pipeline, and real-time Monitoring of Systems. Gained
familiarity with Prometheus, Grafana, InfluxDB, GoLang, React, Docker and Kubernetes. Applied ML and statistical
techniques to anomaly detection and time series forecasting.
Research Intern
Vector Institute
Jan 2023 - May 2023 · Toronto, ON, CA
Worked on using Generative AI, specifically Diffusion Models, to improve performance of discriminative models by training on
real and synthetic images, instead of just the original dataset. Identified 3 key requirements in order for diffusion-based
foundation models to outperform original datasets in downstream classification.
Student Researcher
Google Brain
May 2022 - Dec 2022 · Toronto, ON, CA
Implemented Denoising Diffusion Probabilistic Models for Robust Super-Resolution (SR) in the wild. My work resulted in a patented
publication. The proposed model, SR3+, is an improvement over SR3 and can be used for photorealistic 4x SR even when
trained on out-of-distribution datasets, and can be cascaded for 16x SR.
Research Intern
University of Toronto, Division of Cardiology
Sep 2021 - Apr 2022 · Toronto, ON, CA · Part-Time
I was the Lead Data Scientist in the Toronto Cardiology Team. I worked alongside a team of doctors; we co-authored 2 papers-
both submitted to The 2022 Canadian Cardiovascular Congress. The project was to determine how patient-reported
breathlessness correlates with several objective measures of respiration. I analyzed data collected from exercise
stress tests and produced visualizations using Python, MATLAB and Jupyter Notebook.
Deep Learning for Power Architecture Intern
Nvidia
May 2021 - Aug 2021 · Santa Clara, CA, USA
Worked on project using state-of-the-art machine learning techniques to enhance dynamic boost feature for next generation of
Nvidia's GPU. Implemented algorithm to improve battery-mode dynamic compute power predictions by considering GPU idle time.
Research Intern
University of Toronto, Data-Driven Decision-Making Lab
May 2021 - Aug 2021 · Santa Clara, CA, USA · Part-Time
Investigated whether Twitter data was an appropriate indicator of the spread of Covid-19 across Canada and USA. I fine-tuned a
BERT model (ML model for NLP) using PyTorch to detect mask sentiments, resulting in a 41% improvement in mask attitude classification
compared to vanilla VADER sentiment analysis, outperforming existing hashtag and regex-based classifiers
Research Intern
University of Toronto, Dynamic Systems Lab
May 2020 - Aug 2020 · Santa Clara, CA, USA · Part-Time
Designed and implement a scalable, real time trajectory generation algorithm using MATLAB to synchronize the flight of 50 drones
with live music from a MIDI keyboard. I also surveyed 20+ safe learning research papers and categorized them by key ML concepts
to aid in the creation of a safe learning survey paper.
Software Intern
Sunnybrook Research Institute
May 2020 - Aug 2020 · Santa Clara, CA, USA · Part-Time
Part of the Focused Ultrasound High School Summer Research Program. I implemented an algorithm using Fast
Fourier transform to identify distribution of harmonics present in ultrasound-induced motion signals. I stored
lesion observations in a patient-to-observation database using SQL. I visualized lesion observations as a pseudo-colour,
allowing for customizing colour pixel and bit representation using MATLAB.
Publications
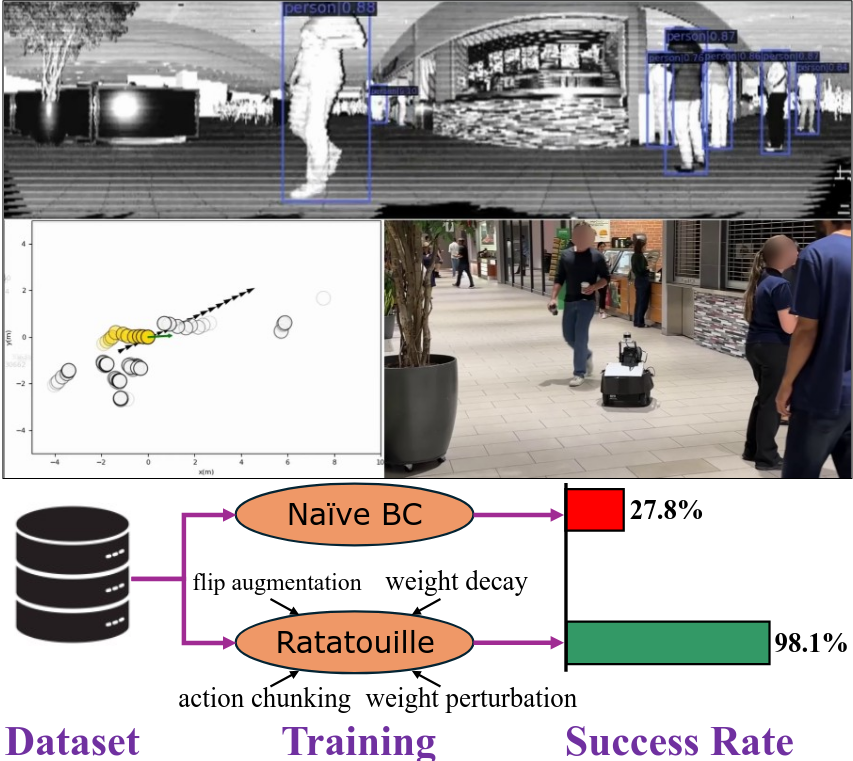
Ratatouille: Imitation Learning Ingredients for Real-world Social Robot Navigation
James R. Han, Mithun Vanniasinghe, Hshmat Sahak, Nicholas Rhinehart, Timothy D. Barfoot
Paper / Video
We present Ratatouille, a behavior cloning pipeline for social robot navigation that integrates weight perturbations, data augmentation,
hybrid action spaces, action chunking, and neural network optimization techniques. Without changing the data, Ratatouille reduces
collisions per meter by 6× and improves success rate by 3× compared to naïve behavior cloning. We validate our approach in both
simulation and the real world, collecting over 11 hours of data on a dense university campus and demonstrating qualitative results
in a public food court.
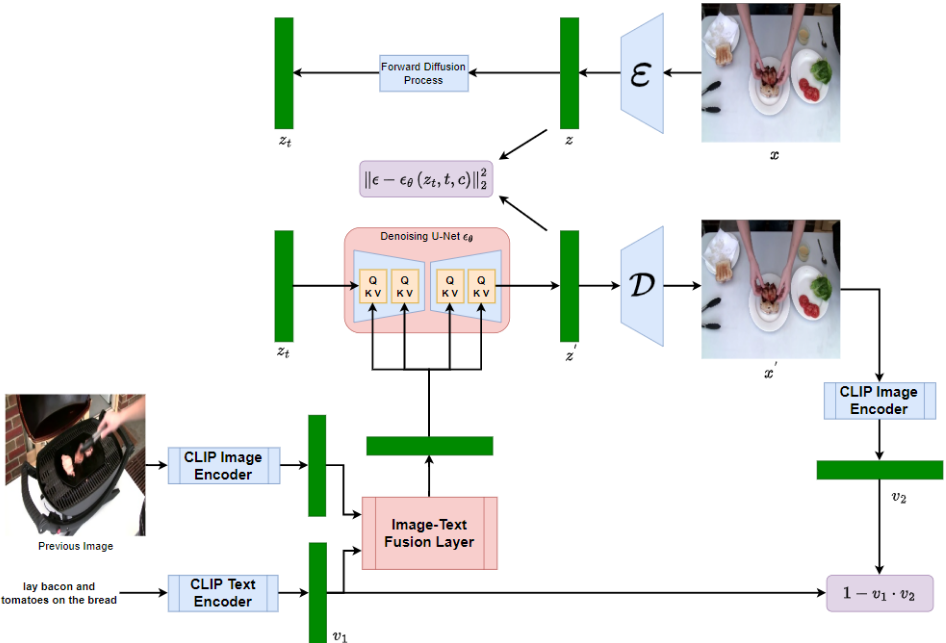
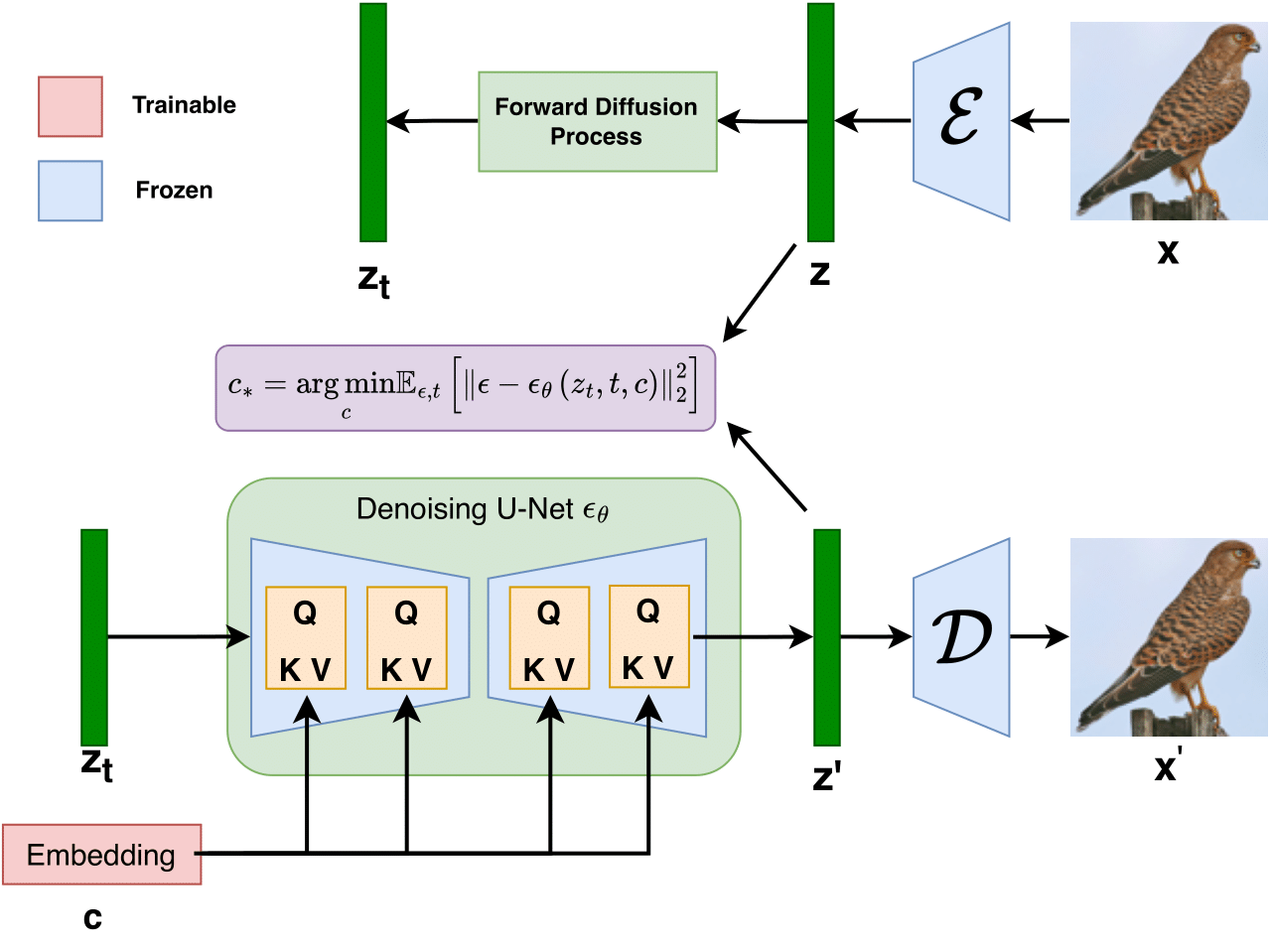
RecipeVis: Fusing Vision and Language Models to Generate Sequence of Recipe Images from Steps
Hshmat Sahak
Paper
We present RecipeVis, which generates an image for each step in a recipe by conditioning on the previously generated image and current step.
RecipeVis leverages the pretrained text-to-image Stable Diffusion model, as well as text and visual encoders that produce task-agnostic
embeddings. It uses an attention module to fuse text and image embeddings, and adds a cycle consistency loss to the standard diffusion
loss to ensure consistency between output modes. Our empirical study demonstrates that vision-language models incorporating previous
images provide superior results over baseline text-to-image models.
Training on Thin Air: Improve Image Classification with Generated Data
Yongchao Zhou, Hshmat Sahak, Jimmy Ba
Project Page / Paper / Code / Slides
We present Diffusion Inversion, a simple yet effective method that leverages the pre-trained generative model, Stable Diffusion,
to generate diverse, high-quality training data for image classification. Our approach captures the original data distribution
and ensures data coverage by inverting images to the latent space of Stable Diffusion, and generates diverse novel training images
by conditioning the generative model on noisy versions of these vectors.
Denoising Diffusion Probabilistic Models for Robust Image Super-Resolution in the Wild
Hshmat Sahak, Daniel Watson, Chitwan Saharia, David Fleet
Paper
This paper introduces SR3+, a diffusion-based model for blind super-resolution, establishing a new state-of-the-art. We advocate
self-supervised training with a combination of composite, parameterized degradations for self-supervised training, and noise-conditioing
augmentation during training and testing.
Projects

Enhancing Diffusion Models for Robust and Efficient Robot Motion Planning
[Final Project] @ University of Toronto, CSC2626: Imitation Learning for Robotics
Paper / Slides
We extend the "Planning with Diffusion for Flexible Behavior Synthesis" framework for trajectory planning in goal-conditioned reinforcement learning.
Our key contributions include middle waypoint conditioning, multi-agent trajectory planning, and dynamic obstacle avoidance, enabling the generation
of globally coherent, context-aware trajectories that adapt to complex environments. Experiments on the Maze2D task demonstrate significant improvements
in trajectory feasibility, safety, and planning efficiency, with enhanced multi-agent coordination in dynamic environments.
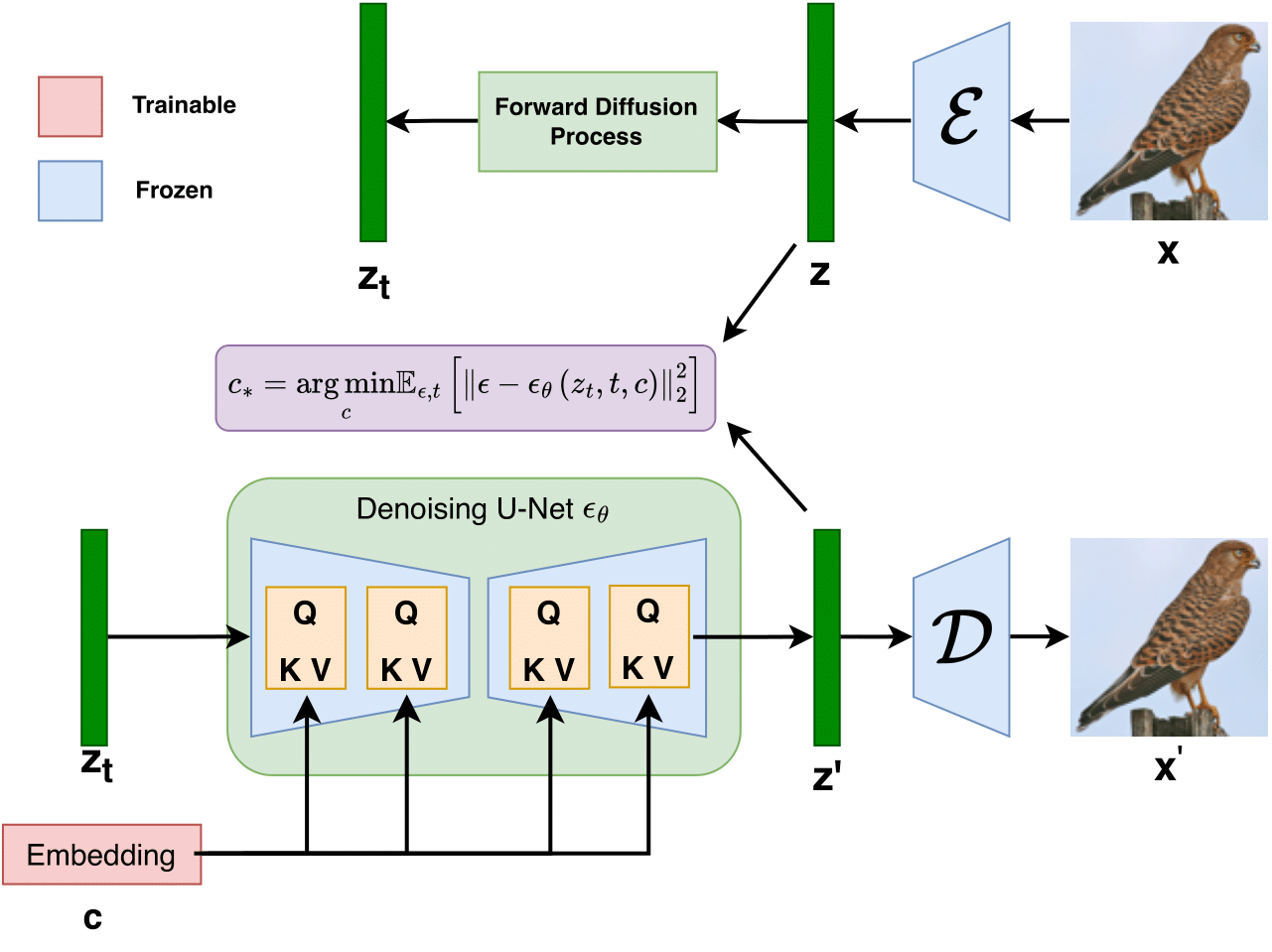
Diffusion Inversion: Steering Pre-Trained Diffusion Models to Improve Image Classification on Rare Datasets
[Research Project] @ Vector Institute, with Yongchao Zhou and Jimmy Ba.
We propose Diffusion Inversion, a simple yet effective method that utilizes pre-trained generative
models to assist with discriminative learning, bridging the gap between real and synthetic data.
Our method offers 2-3x sample complexity improvements and 6.5x reduction in sampling time.

Blue Guardian: Protect Before they Connect
[Research Project] @ Blue Guardian
Blue Guardian is a startup that aims to revolutionize Youth Mental Health Detection through Sentiment Analysis of text messages.
I worked on implementing state-of-the-art NLP methods for emotion detection, including feature extraction and transformer architecture
implementation. I also tackled problems of limited and imbalanced datasets resulting from uncommon emotions. Our model has been deployed
and can be accessed through the app or website.
SR3+: Using DDPMs for Robust Super-Resolution in the Wild
[Research Project] @ Google Brain, advised by David Fleet.
We introduce SR3+, a diffusion model for blind image super-resolution, outperforming SR3 and the previous
SOTA on zero-shot RealSR and DRealSR benchmarks, across different model and training set sizes. Through a
careful ablation study, we demonstrate the complementary benefits of parametric degradations and
noise conditioning augmentation techniques (with the latter also used at test time).
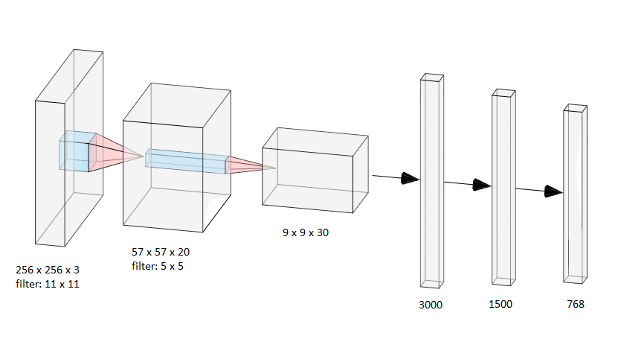
VGH-Net: Predict Restaurant Ratings from Food Images using CNN
[Final Project] @ University of Toronto, ECE324: Machine Learning, Software, and Neural Networks
Final Report / Code
We present VGH-Net; a novel architecture for predicting restaurant ratings from a set of food images. VGH-Net training occurs
in two stages. First, a CNN learns to predict image embeddings matching the output of BERT on a restaurant's text reviews.
Then, it attaches a feed-forward neural network to predict the review-specific restaurant rating from the embedding.
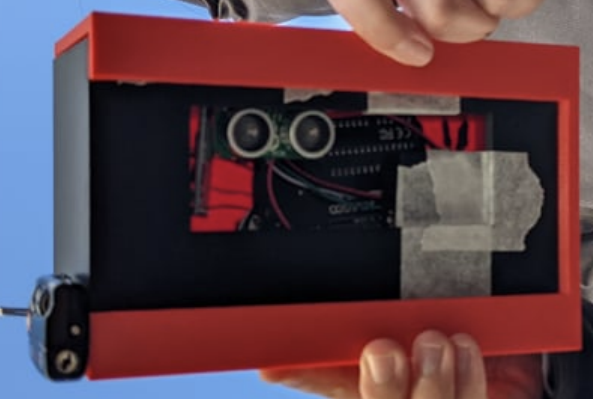
Trash n' Track : Addressing Waste Management in Ghana
[Final Project] @ University of Toronto, ESC204: Praxis III
Final Report / Slides
Trash n' Track is a modular system that can be attached to existing waste bins to let waste collectors know of the location of full bins. It
uses an ultrasonic sensor to determine the available capacity of the waste bin. This information, along with the location of the waste
bin determined from an onboard GPS module, is sent to a server using a LoRa transceiver. We have also created a webapp that connects to
this backend in order to provide live updates of waste bin fullness and location to waste collectors.
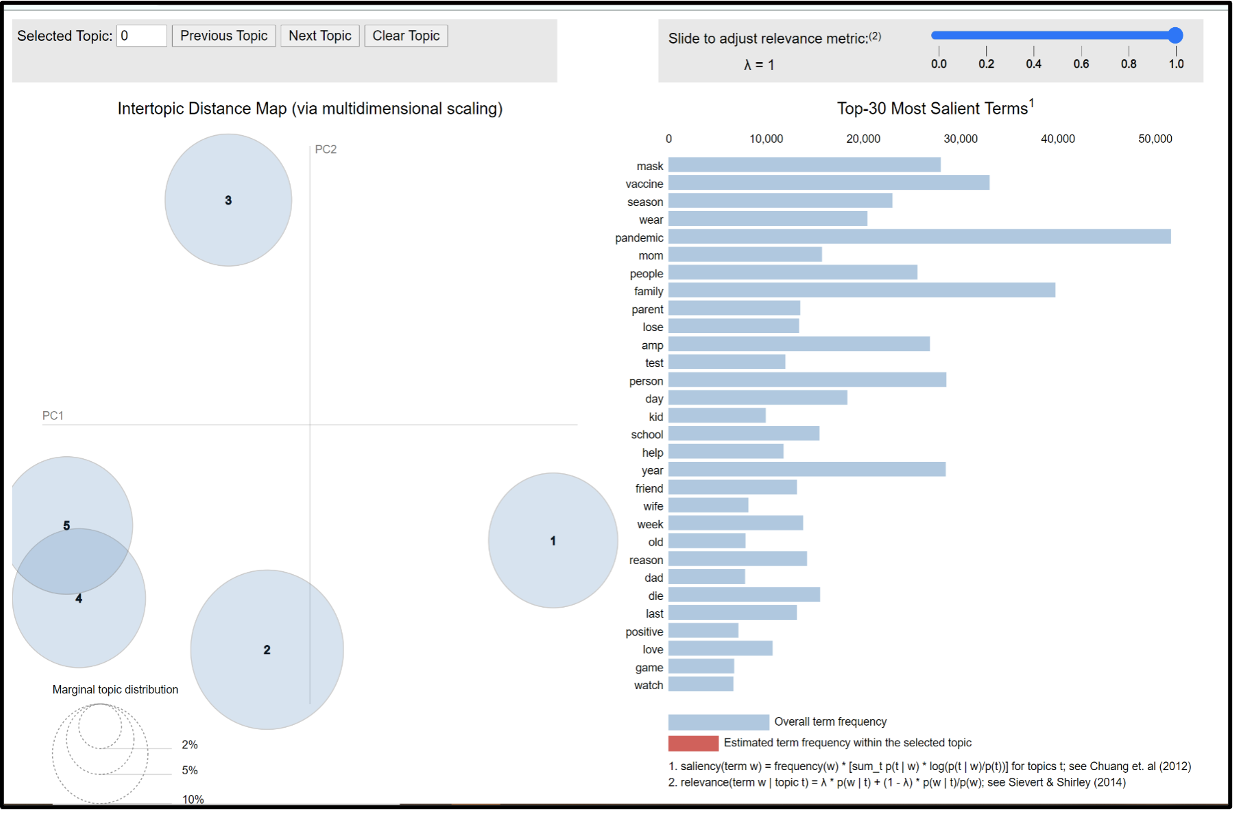
Using Twitter to detect the Spread of Covid-19
[Research Project] @ University of Toronto, Data-Driven Decision-Making Lab
Code / Slides
Compared COVID statistics in various regions with corresponding COVID-related tweet counts and mask/vaccine hesitancy scores. Used Folium library,
word clouds and topic modelling to identify spatial & temporal tweet distribution. For more accurate labelling, fine-tuned BERT model using PyTorch
to detect mask sentiments, improving mask attitude classification by 41% compared to vanilla VADER sentiment analysis and outperforming existing hashtag & regex-based classifiers
Chess AI
[Side Project], with Ritvik Singh
Code
Developed chess engine using Python chess module. Beta release used alpha-beta pruning on a minimax tree. Final version
uses multiple advanced algorithms, including Killer Move Heuristic, History Heuristic, Principle Variation Search, Transposition Table,
Zobrist Hashing, Quiescent Search, and Iterative Deepening. The AI is around 1500 ELO as measured by chess.com.
Snake Game
[Final Project] @ University of Toronto, ESC190: Data Structures and Algorithms
Final Report / Code
Developed an AI agent to play the snake game. The agent starts at the top left and aims to consume all food while avoiding
hitting the walls and itself as it grows. For small board sizes, used Randomized Path Finding Algorithm. For larger board sizes,
used DFS on the game state stack to find the target. It is flexible across varying board sizes, while keeping O(n)
space complexity on an nxn board.
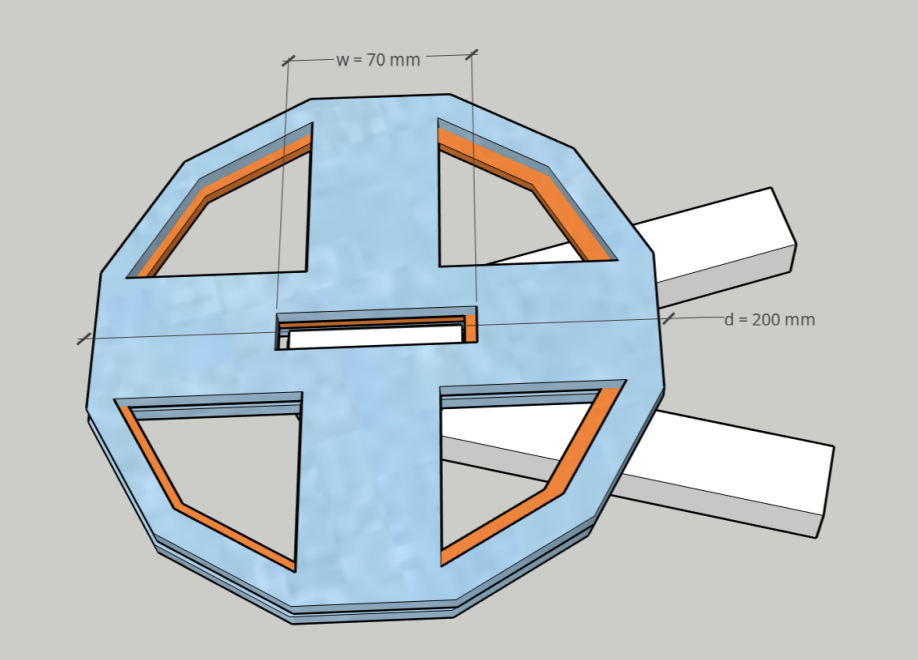
FRONT: Improved Can Openers at Kohai Life
[Final Project] @ University of Toronto, ESC102: Praxis II, with Mingde Yin, Aoran Jiao, Ryan Ghosh
Report / Demo
FRONT: Force Redirection Object Negotiator Tool, a retrofit extension designed to
be attached to the actuator bar of the handle of a can opener to allow opening of cans with less directed
work and make it easier for people of differing abilities to use in daily life. FRONT is a retrofit module
that aims to convert a simpler pulling force in any direction to the traditional rotary force needed to cut a
can. The nature of the design is intuitive; to cut the can one simply attaches the module and pulls on a
string attached to a rotary guide wheel, guaranteeing that there is some component of force in the
direction of undisturbed motion(useful work)

Robot Pet
[Side Project], with Gabriel Luo
Code / Demo
Built and programmed a robotic pet that can pick up and sort objects, respond to stimuli, draw, and play the piano.
Worked with Arduino microcontroller; using Bluetooth to control the arm and various sensors for obstacle detection, path planning
and environmental detection.